ROS (Robot Operating System) ist ein Open-Source-Projekt, das ein Framework und Tools für Robotikanwendungen bereitstellt. Es hilft, komplexe Software zu entwerfen, ohne zu wissen, wie bestimmte Hardware funktioniert.
Noetisch ist eine LTS-Version von ROS und auf Ubuntu 20.04 zugeschnitten. ROS Noetic Support läuft bis 2025 (5 Jahre). Die unterstützten Architekturen sind amd64, armhf und arm64.
In diesem Tutorial erklären wir Ihnen, wie Sie ROS Noetic installieren auf Ubuntu 20.04 .
1. Offizielles Noetic-Repo zu Ubuntu hinzufügen
Der erste Schritt bei der Installation von ROS Noetic besteht darin, das offizielle ROS Noetic-Repository zur Quelllistendatei von Ubuntu 20.04 hinzuzufügen.
Um Noetic Repo hinzuzufügen, geben Sie Folgendes ein:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listAusgabe:
deb http://packages.ros.org/ros/ubuntu focal main.2. Offiziellen ROS-Schlüsselbund hinzufügen
Fügen Sie als Nächstes den offiziellen ROS-Schlüsselring zu Ihrem Ubuntu 20.04-System hinzu. Dafür gibt es zwei Möglichkeiten.
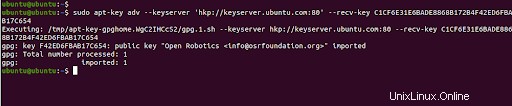
Die erste Methode ist die Verwendung von hkp://keyserver.ubuntu.com:80 Ubuntu-Schlüsselserver. Wenn dies nicht funktioniert, können Sie versuchen, es durch hkp://pgp.mit.edu:80 zu ersetzen . Führen Sie also den folgenden Befehl aus.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Die zweite Methode besteht darin, den Befehl curl zu verwenden, um den offiziellen ROS-Schlüsselbund herunterzuladen und lokal hinzuzufügen.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -Die Ausgabe „OK“ bedeutet, dass der Schlüssel erfolgreich hinzugefügt wurde.
3. Aktualisieren Sie den ROS-Paketindex
Als nächstes werden wir unser Ubuntu-System aktualisieren, um die ROS Noetic-Paketinformationen aus dem Repository zu erhalten.
$ sudo apt updateDadurch wird das neu hinzugefügte Repository mit den Online-Ubuntu-Repositorys synchronisiert.
4. Installieren Sie ROS Noetic auf Ubuntu 20.04
ROS verfügt über mehrere Metapakete, die Sie je nach Bedarf installieren können.
Die folgenden sind die offiziellen ROS Noetic-Metapakete:
- ros-noetic-desktop-voll
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Wählen Sie Ihr bevorzugtes Metapaket und installieren Sie es mit einem der folgenden Befehle.
Installieren Sie ros-noetic-desktop-full
Das Paket ros-noetic-desktop-full enthält alle Pakete in ros-noetic-desktop sowie die Pakete Perception (ros-noetic-perception) und Simulation (ros-noetic-simulators).
Um ros-noetic-desktop-full zu installieren, führen Sie den folgenden Befehl aus:
$ sudo apt install ros-noetic-desktop-fullNachdem Sie den Befehl ausgeführt haben, drücken Sie Y um mit der Installation fortzufahren.
ros-noetic-desktop installieren
Ros-noetic-desktop ist eine minimale Version von ros-noetic-desktop-full. Es enthält die meisten Tutorial-Pakete, einschließlich:
- gegenüber
- Winkel
- common_tutorials
- geometry_tutorials
- ros_tutorials
- Roslint
- urdf_tutorial
- visualization_tutorials
Um ros-noetic-desktop zu installieren, führen Sie den folgenden Befehl aus:
$ sudo apt install ros-noetic-desktopros-noetic-base installieren
Die ros-noetic-base enthält nur Basispakete. Es enthält die Pakete in ros_core und andere grundlegende Nicht-Roboter-Tools wie dynamische Neukonfiguration, Nodelets und Actionlib.
Führen Sie den folgenden Befehl aus, um ros-noetic-base zu installieren:
$ sudo apt install ros-noetic-baseros-noetic-core installieren
Der ros-noetic-core enthält eine Sammlung der absoluten Mindestpakete. Die Pakete beinhalten:
- common_msgs
- gencpp
- Gene
- genlisp
- genmsg
- gennodejs
- genpy
- message_generation
- message_runtime
- pluginlib
- rosa
- ros_comm
- rosbag_migration_rule
- Rosconsole
Führen Sie den folgenden Befehl aus, um ros-noetic-core zu installieren:
$ sudo apt install ros-noetic-core5. ROS Noetic-Umgebung einrichten
Der nächste Schritt ist die Einrichtung der ROS Noetic-Umgebung. Geben Sie zuerst das setup.bash-Skript in jedem Bash-Terminal, das ROS verwendet, ein:
$ source /opt/ros/noetic/setup.bashFügen Sie die .bashrc-Datei hinzu, die sich in Ihrem Home-Verzeichnis befindet, um zu vermeiden, dass sie jedes Mal ausgeführt wird, wenn Sie eine neue Shell starten:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcÜberprüfen Sie dies, indem Sie den folgenden Befehl ausführen:
$ tail ~/.bashrc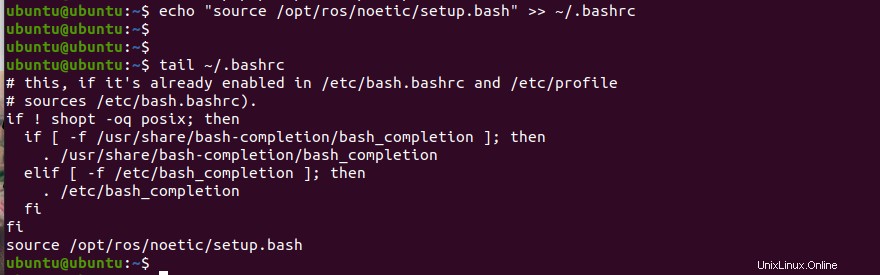
Geben Sie Folgendes ein, damit die Änderungen wirksam werden:
$ source ~/.bashrc Noetic-Installation überprüfen
Führen Sie nach erfolgreicher Installation von ROS Noetic auf Ubuntu 20.04 einfach den Befehl roscd aus.
$ roscdSie werden feststellen, dass sich das aktuelle Verzeichnis Ihrer Eingabeaufforderung in /opt/ros/noetic ändert , wo wir Noetic installiert haben.

Wir können die Installation auch überprüfen, indem wir roscore ausführen Befehl im Verzeichnis noetic. Die Ausgabe zeigt die ros-Distribution und die ros-Version in der Zusammenfassung an.
$ roscore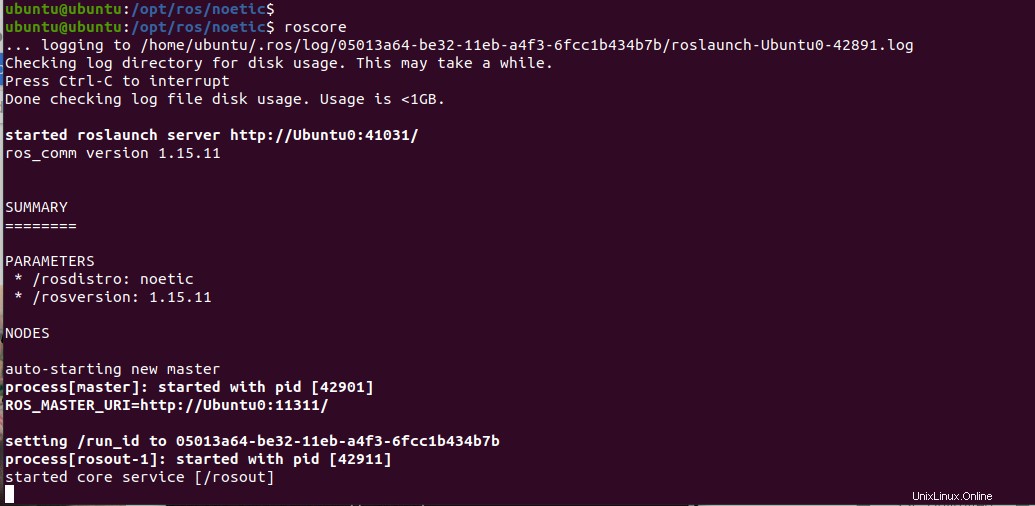
Schlussfolgerung
In diesem Tutorial haben wir gelernt, wie man ROS Noetic auf Ubuntu 20.04 installiert. Jetzt können Sie Ihre Roboter mit Noetic programmieren.